

Robotic Arm – 2 Degrees Of Freedom
The Robotic Arm – 2 Degrees Of Freedom has been designed to fulfill two specifications, from the mechanical point of view: 1. the arm had to be very lightweight, 2. radial motions of the tip had to be nearly decoupled from angular motions (if we neglect the vibrations because of flexibility). In order to fulfill the first specification, the links woe made of a very lightweight wire (having consequently a significant elasticity), and the motor thai moves the elbow was placed close to the base of the ann. A four-tor linkage was used to transmit the motion of this motor to the elbow. In order to fulfill the second specification, the length of the two links was made the same, and the dimensions of the four-bar linkage were especially designed.
This report describes the design and control of a small two-joint, two-link flexible ann that we have built in our laboratory. This arm operates in a plane on an air table. The ann is designed with exaggerated flexibility to facilitate studying the control of flexible structures; and is very light in weight compared to the mass placed at the tip (there is no mass placed at the elbow joint). The purpose of our research on flexible arms is to design more efficient and faster aims than the actual rigid arms. Our very lightweight arm is efficient in the sense that most of the energy provided by the motors is spent in doing the task (moving the tip mass), and little is wasted in moving the arm structure (unlike rigid arms). We wanted also to decouple radial motions of the tip from angular motions. A special four-bar linkage is used to drive the elbow joint from a motor mounted near the base. Mechanics of this arm are described in Section 2; and a dynamical model is developed for this arm, that can be easily extended to any n-degrees of freedom lumped-mass flexible ann.

Based on 0 reviews
Be the first to review “Robotic Arm 2 Degrees Of Freedom”
You must be logged in to post a review.
Related products
-
Robotics
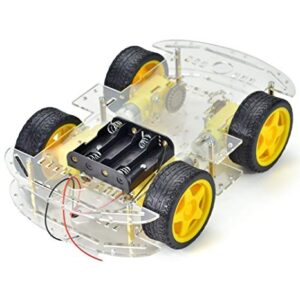
Metal 4WD Smart Robot Car Chassis For Arduino With 85mm Wheel 4 Wheels Car
Specifications:
- Chassis Material: Metal
- Wheel Diameter: 85mm
- Drive Configuration: 4WD (Four-Wheel Drive)
- Motor Type: DC Geared Motor with Encoders
- Compatibility: Arduino and other microcontrollers
- Mounting Points: Multiple for sensors and accessories
SKU: n/a -
Robotics
2wd Car Chasis
Features:
- 1x 2WD V15 1 Smart Car Floor
- 2x Geared Motor 1:48 JSDJ 1
- 1x Battery Box DCH 1
- 1x Caster WXL 1
- 2x Encoder Disk MBP 1
- 4x M3*28 Screw LS 2
- 2x Smart Car Wheels CLV 1
- 10x M3*7.5 Cap Screw LS 1
- 15x M3 Screw Nut LM 1
- 4x M3*13MM + 6 Copper Cylinder TZ 1
- 4x Acrylic Fasteners JGJ V1
SKU: n/a





There are no reviews yet.